
X-Plane コクピットの自作に挑戦!
Teensyを使うと、ボリュームを回して、スロットルをコントロールすることができます。

このスロットルをコントロールします。
今回の実際のレイアウトと配線図です。見本の動画の後半に出てくるスロットルです。
赤枠内が実際の配線見本、左上にサーボ、中央にTeensy、右下にボリューム
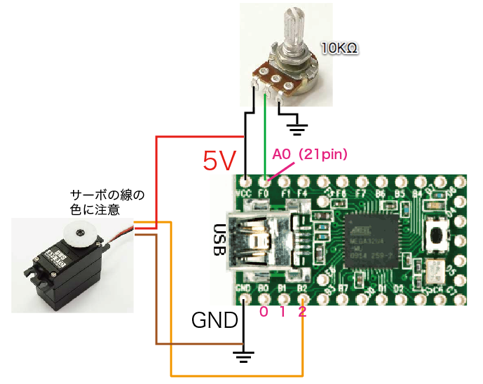
10KΩボリュームと、サーボを使用しています。
サーボは3本が出ていますが、色に注意して配線。規格書をよく見てください。ボリュームも同じですが、配線が間違っているとショートした状態になり、熱を出して危険ですので、実際に電圧をかけたときに熱くならないか、匂い等、十分注意して見守るように。
Arduinoでスロットルサーボのスケッチを選択
Arduinoで「スケッチの例」メニューから「ThrottleServo」を選択。
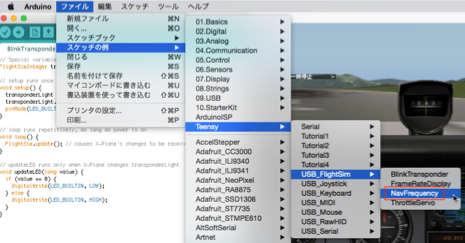
この画面は「NavFrequency」になっていますが、「ThrottleServo」はその下です。
ThrottleServoのスケッチを最初から簡単に説明します(Arduionではプログラムのことをスケッチという)
#include<Servo.h>
Servo motor; // an RC Servo motor
FlightSimFloatthrottle; // access to X-Plane's throttle
constintmotorPin =2;
constintpotentiometerPin =A0; // Analog 0: Teensy = 23, T++ = 38
int previousAnalog =-100;5行目からの const int motorPin = 2; はサーボは2番ピンを指定しています。
6行目の const int potentiometerPin = A0; はボリュームを繋ぐピンですが、A0はTeensy 2.0では21番ピンになります。
Teensyに書き込みます。

ここまで完了すれば、後は配線を済ませて、X-Planeを起動するだけです(セスナ172SPを使用していますが、どの機体でも同じです)。
X-Planeが起動し、間違いなく設定できていたら、ボリュームを回すと、下の画面のレバーが移動して実際にスロットルをコントロールします。

ThrottleServo.ino
#include <Servo.h>
Servo motor; // an RC Servo motor
FlightSimFloat throttle; // access to X-Plane's throttle
const int motorPin = 2;
const int potentiometerPin = A0; // Analog 0: Teensy = 23, T++ = 38
int previousAnalog = -100;
// setup runs once, when Teensy boots.
//
void setup() {
motor.attach(motorPin);
throttle = XPlaneRef("sim/flightmodel/engine/ENGN_thro[0]");
throttle.onChange(viewThrottle);
Serial.begin(9600);
Serial.println("Throttle Demo");
}
// loop runs repetitively, as long as Teensy is powered up
//
void loop() {
// normally the first step in loop() should update from X-Plane
FlightSim.update();
// when human motion chances the port, change throttle
int analog = analogRead(potentiometerPin);
// "more than 6" allows for some noise
if (analog < previousAnalog - 6 || analog > previousAnalog + 6) {
throttle = analog / 1023.0;
previousAnalog = analog;
int angle = throttle * 70.0 + 30.0;
motor.write(angle);
Serial.print("(Analog) Throttle = ");
Serial.println(throttle);
}
}
// When X-Plane changes the throttle....
//
void viewThrottle(float val)
{
int angle = val * 70.0 + 30.0;
motor.write(angle);
Serial.print("(X-Plane) Throttle = ");
Serial.println(throttle);
}