
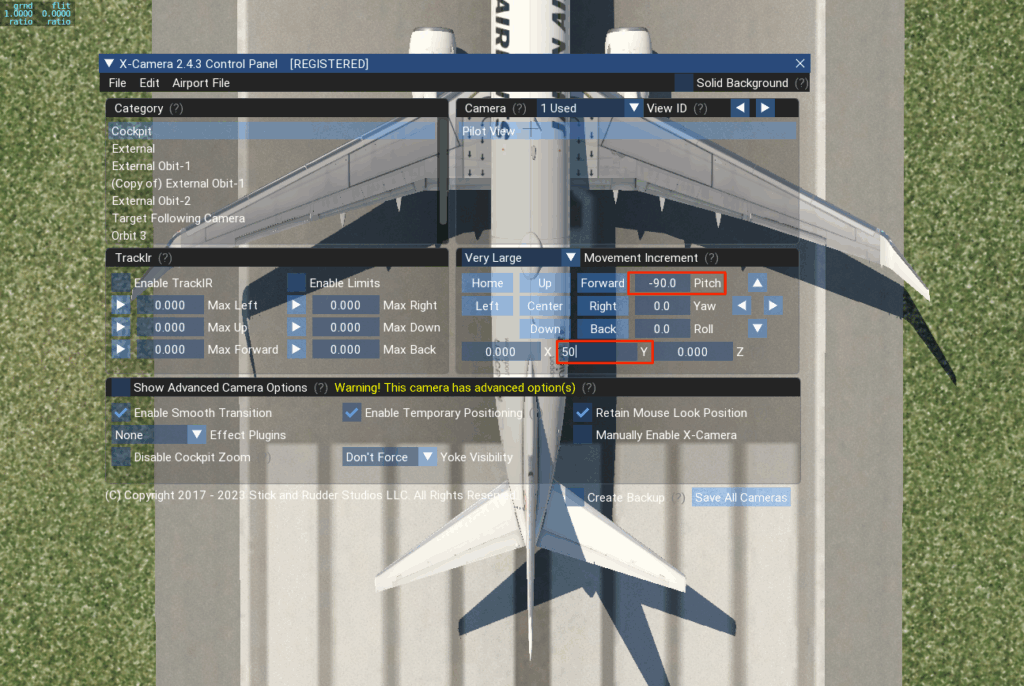
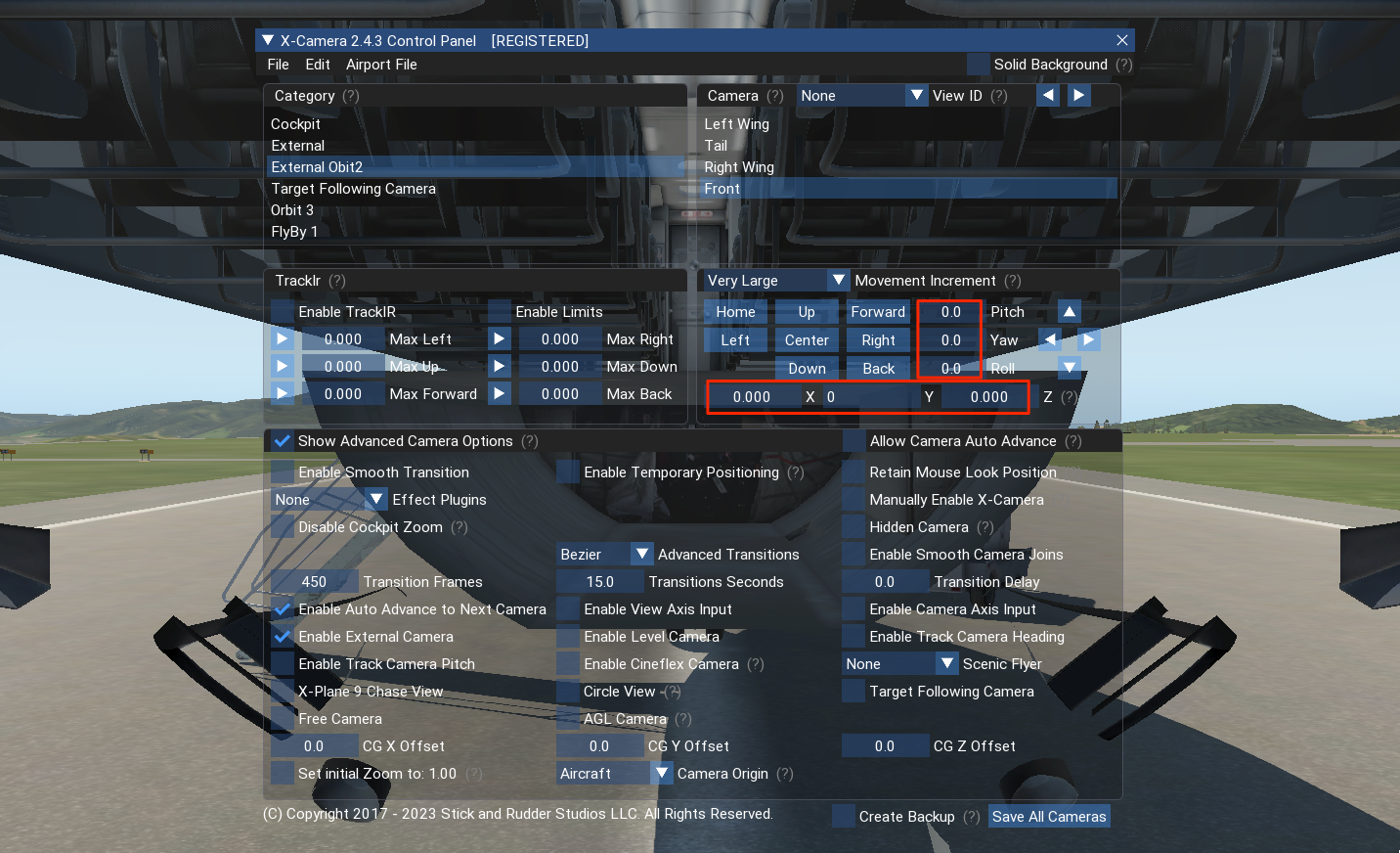
X-Cameraの「0」設定は以下のようになっている。重心の下の位置が表示されている。
B737-800の機体の下が重心位置でこの機体の前がフロントになる。つまり今、機体は前を向いている。
従って、カメラは前方(Y)を見て50位の位置まで上げて、カメラを-90(Pitch)下に倒すとカメラは真上から見たようになる。
Up、Down、Left、Right は X、Yと同じになる。
Foward、Backは前進と後進。これも画面の位置での前進と後進になる。
Up、Downも同じ用に画面の位置でのカメラの上下移動。
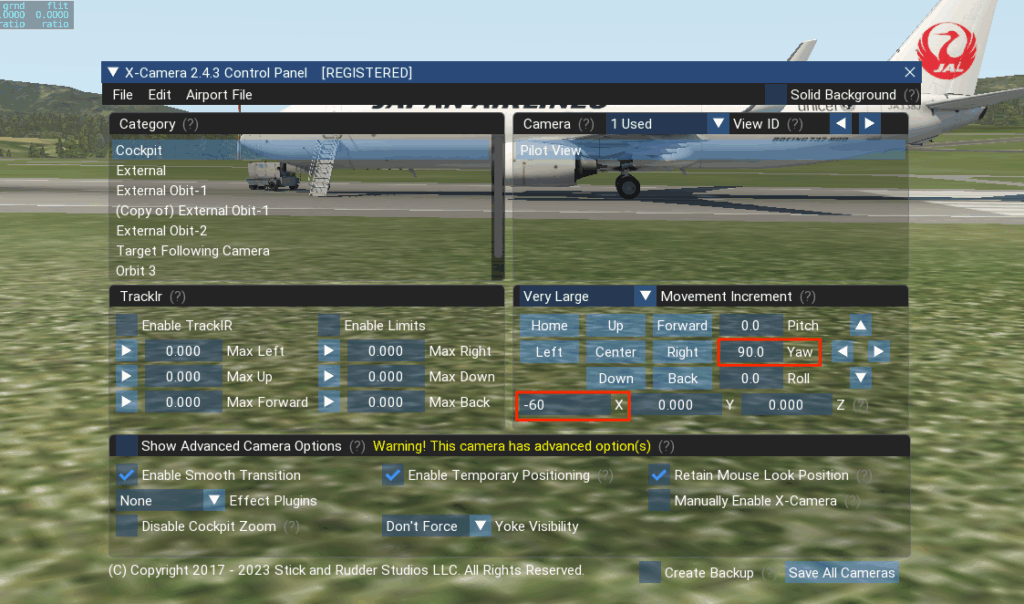
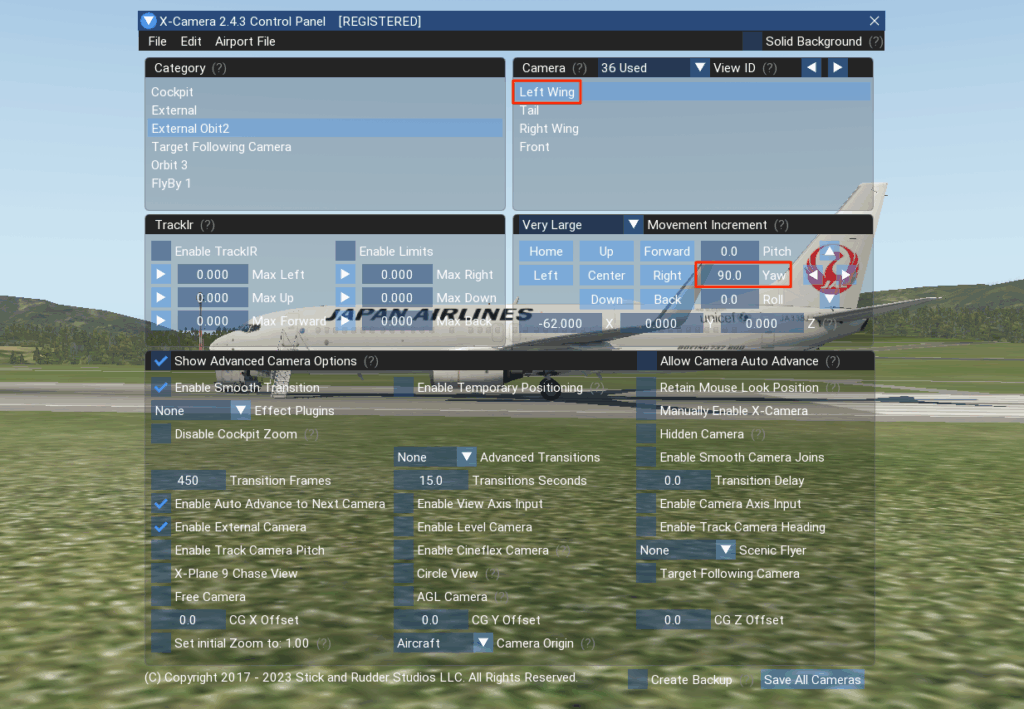
左横から見るにはX=-60、Yaw=90の設定になる。
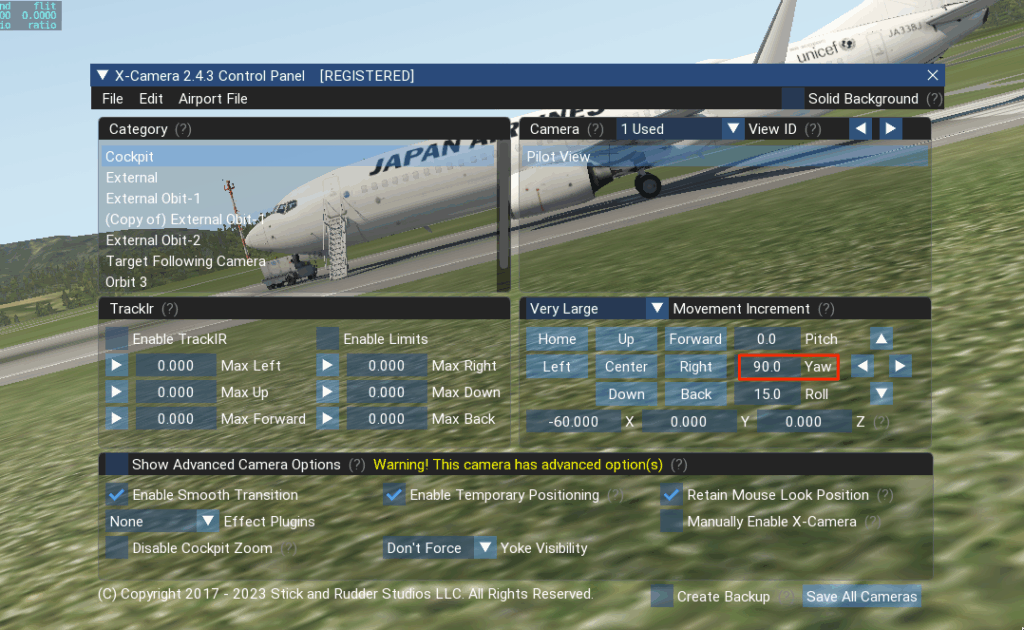
横から見て、Rollを15にすると機体の中心を起点に画面が左下がりになる。-にするとその逆。
Rollは見ている画面の機体の中心を起点に回転している。例えば下のように左からみると機体の横を中心に回転する、上から見ると機体の中心を起点に画面が回転する。
以下の矢印は別の動きをする。ここは機体と関係なくカメラの向きが変わるのが特徴である。これ以外は常に機体の中心を向いてカメラが移動する。機体の中心を向くか、機体と関係なく向くかの違いになる。
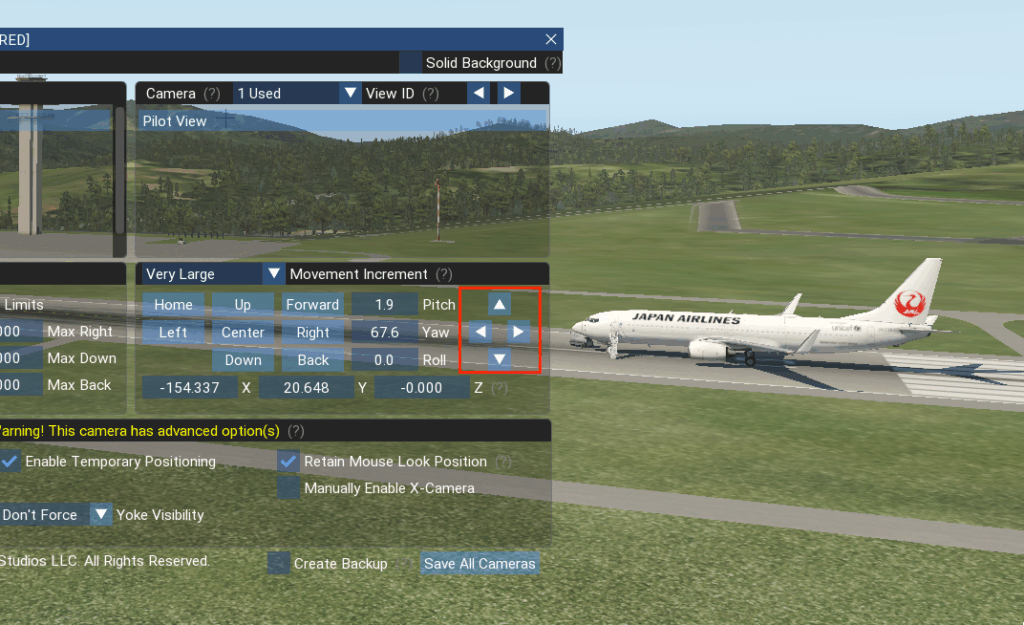
以下のように「Yow」を一定に揃えるとカメラの動きが接続点でもスムーズになる。
ここで設定していない「Eanble Smooth Trancition」は必ずチェックを入れること。これを忘れると設定と違った動きになる。つまりチェックを外すと最初の動き始めの設定が実行されているように見える。
全部「0」にするとカメラは機体の中心にあり、前方を向いていることになる。
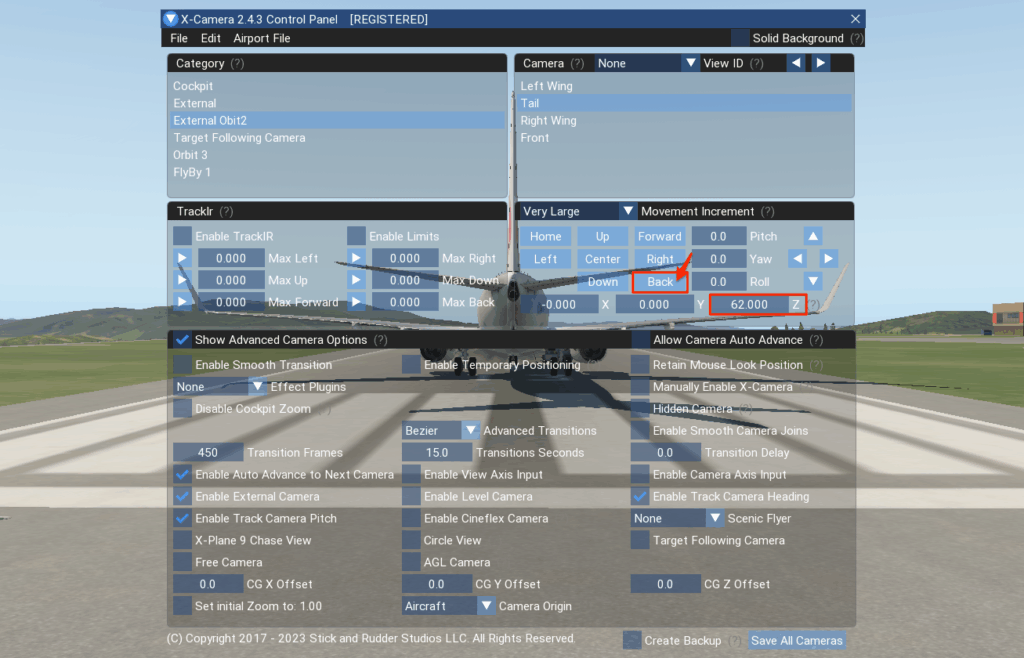
まず、Tailを選択して「Back」をクリックしてカメラを後方にさげる。Zが「62.00」の後方位置に下がったことになる。ここで一度保存。
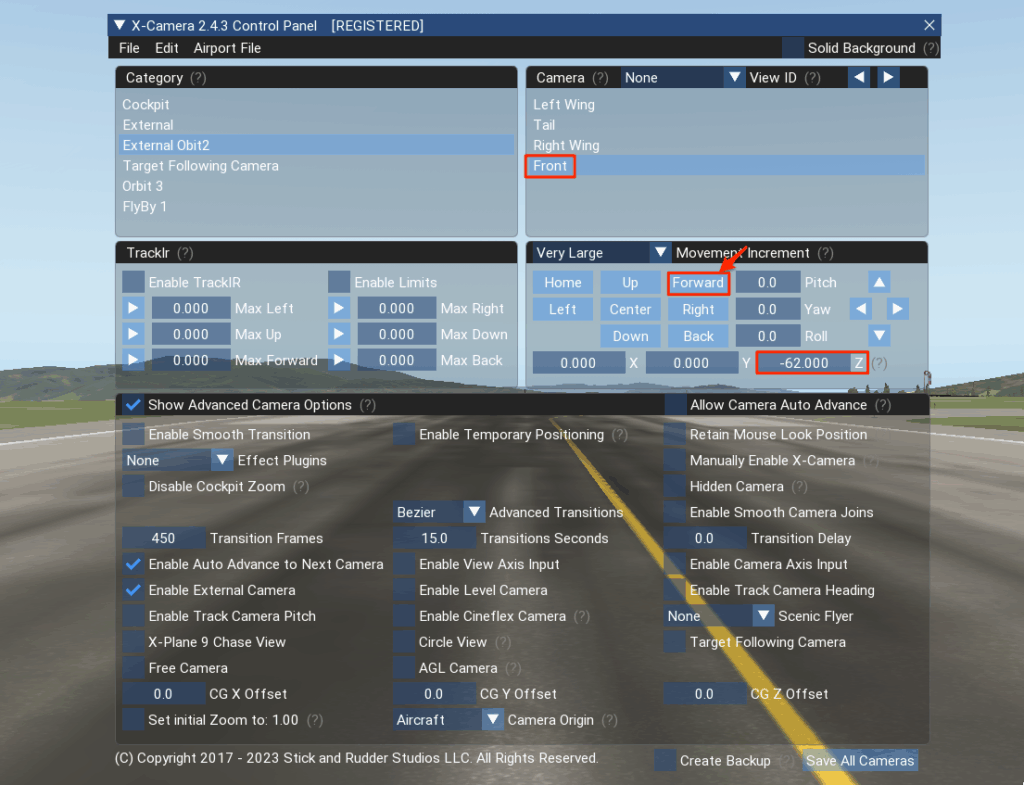
次に「Front」を選択して「Forward」ボタンをクリックしてカメラを前進させる。Z位置は「-62.00」と後方の値と同じにすると後方と同じだけの位置にカメラが前進することになる。
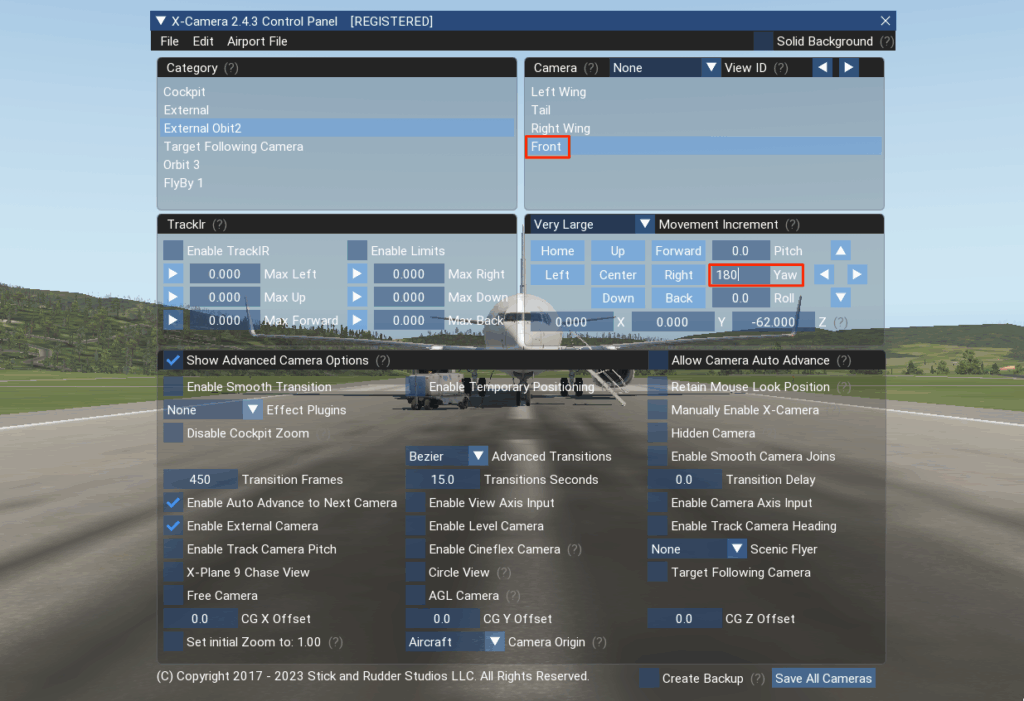
この位置で「Yaw」を180度回転するとカメラが後ろ向きになり機体の正面に位置するようになる。ここで保存する。
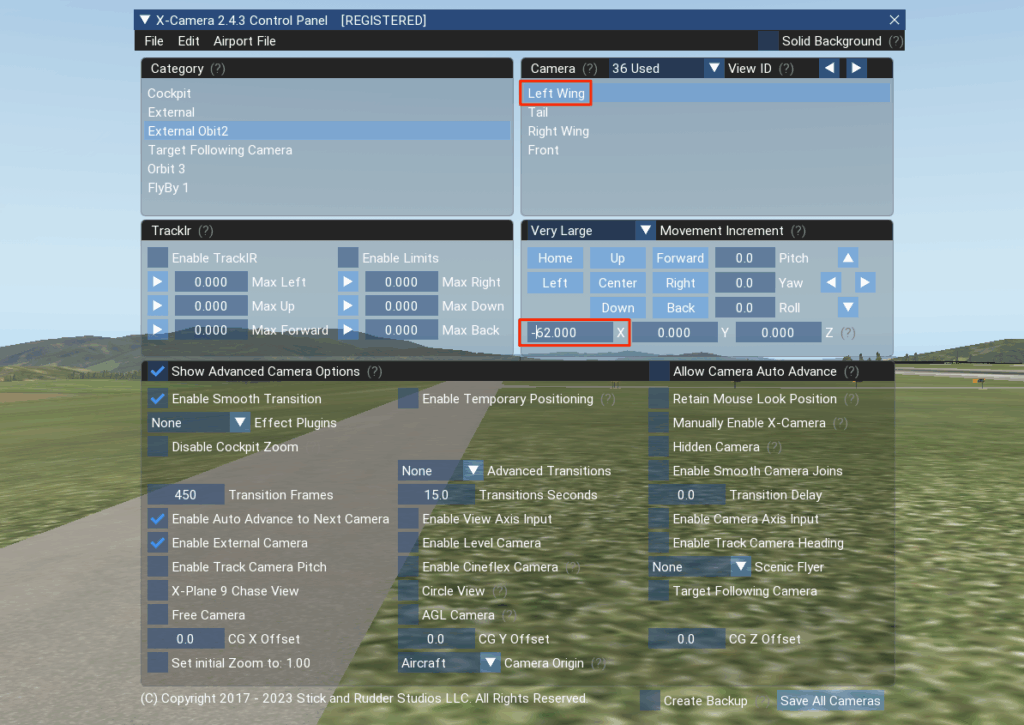
Left Wingを選択。全ての数値を0の戻し、この時点でカメラは前方に向いているのでX軸を中心から-62にすると左に移動する。これで機体の左側に移動した、カメラは前を向いたままなので右90度に向きを変える。
Yawを90にするとカメラが90度向きを変えて機体の左側を捉えることになる。ここで保存。
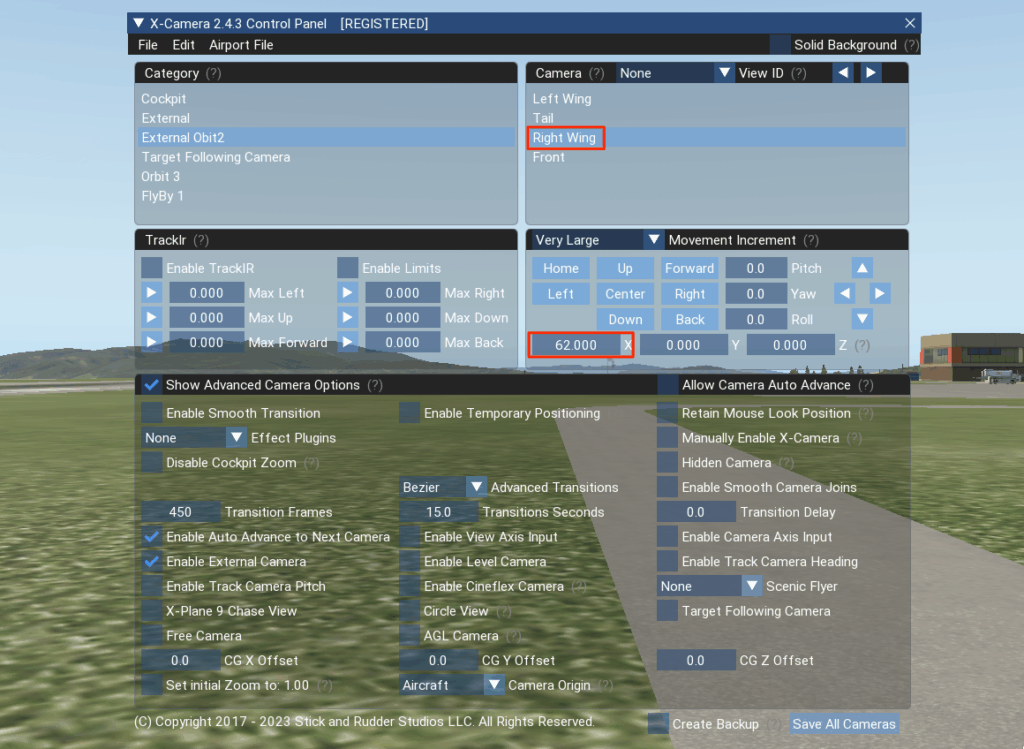
最後にRight Wingを選択、全て0にして、今度は右に62移動する。カメラは前方を向いているのでグルっと270度回ると丁度機体の右を捉えることになる。保存する。
しかし、これだと同じ距離のはずなのが、左右や後方に自動で回すと接近してカメラが移動する。Z位置の関係でX位置が同じ位置でも機体に接近して表示されるので、左右と後方を下げる必要があるようだ。
以下の設定でうまく行った、左右と後方を下げて、左右のZ軸を前に移動すると前方が隠れずにうまく表示されるようになった。
Front:Pitch=-12、Yaw=180、Roll=0、X=0、Y=5、Z=-35
Left Wing:Pitch=-12、Yaw=90、Roll=0、X=-150、Y=5、Z=-80
Tall:Pitch=-12、Yaw=0、Roll=0、X=0、Y=5、Z=190
Right Wing:Pitch=-12、Yaw=270、Roll=0、X=132、Y=5、Z=-56
繋目の問題点
繋目で急に速度が変化する:これは次のポイント、あるいは前のポイントまでの距離が関係しているようで、時間を調整してやると解決する。急に遅くなるならその接続ポイントの「Transition Secondes」を長くしてやるとうまくいくということになる。これは微妙な調整になるので何度も試してやる必要がある。